Over the rainbow

BALLON STRATOSPHERIQUE EXPERIMENTAL
LYCEE ROUVIERE TOULON
CLASSES DE
1ère en Sciences et Techniques de Laboratoire
1ère BTS en Systèmes électroniques
Le projet OVER THE RAINBOW a concerné les 2 classes suivantes
- 1ère en Sciences et Techniques de Laboratoire
- 1ère BTS en Systèmes électroniques
Sous ma responsabilité (Joan ERRA) et celle de Daniel BRUNET tous deux enseignants en Mesure et Instrumentation et en électronique.
- Ce rapport à pour objet principal de présenter une synthèse du travail effectué par les élèves du lycée Rouvière qui ont participé à ce projet. Cette synthèse présente les expériences tentées qu'elles aient réussies ou échouées, ceci dans le but d'aider les futurs projets.
- Un film de 20mn retraçant le jour de lâcher a été réalisé par Daniel Brunet.
- Chaque binôme d'élèves de 1ère STL a élaboré un petit diaporama sur le travail effectué.
- Chaque binôme d'élèves de 1ère année en BTS systèmes électronique a produit un dossier technique sur la carte qu'il a développé.
Nous remercions l'association planète sciences et le CNES ( Centre National d'Etudes Spatiales) ainsi que l'administration du Lycée Rouvière , en particulier Mr Christian Pieri chef des travaux qui ont permis la mise en place du projet.
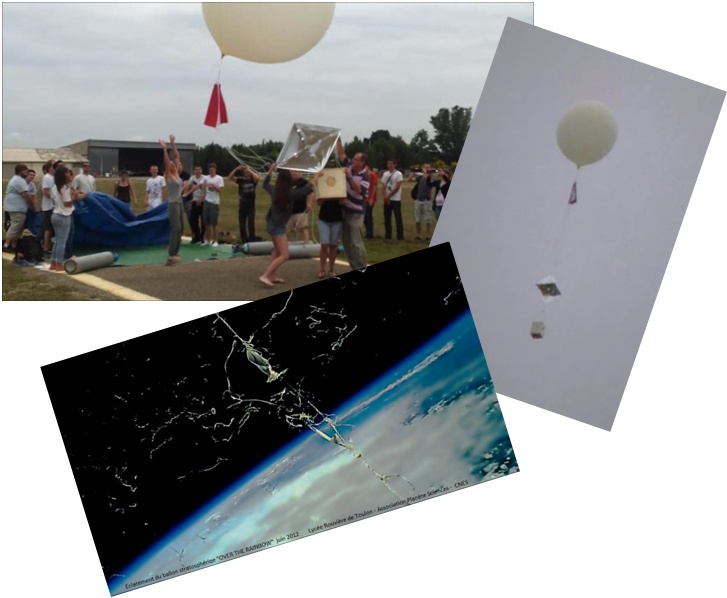
Le CNES et l'association Planète Sciences, a mis à notre disposition un ballon stratosphérique pour y embarquer des expériences scientifiques. il s'agissait de réaliser la nacelle et nous avons décidé d'y placer des dispositifs de prises de vues et de mesures de grandeurs physiques afin d'en étudier leurs évolutions suivant les différentes couches de l'atmosphère.
Les objectifs ont été en partie définis par les élèves en concertation avec les enseignants :
Acquérir les données de vol afin de renseigner les conditions de vol
- température extérieure
- température intérieure à la nacelle.
- Pression atmosphérique
- Humidité
Transmettre en temps réel les données de vol à terre grâce au système de télémesure KIWI du CNES, dont l'émetteur sera embarqué dans la nacelle.
Stocker les données mesurées dans une carte mémoire embarquée.
Embarquer un appareil photo et des mini- caméras, pour ramener des images du lâcher, de la stratosphère et de l'éclatement du ballon et de l'atterissage.
Placer dans la nacelle un dispositif (tracker GPS ou autre) permettant de localiser facilement le point de chute, afin de récupérer la nacelle.
Les 2 classes étant divisées chacune en 2 groupes d'une dizaine d'élèves, nous avions décidés de réaliser 2 nacelles. En fin de projet, une nacelle serait choisie et l'autre serait utilisée comme nacelle de secours.
Répartition des tâches au sein de la classe de 1ère STL
Responsables des choix des capteurs, et chargés de relever leurs courbes d'étalonnage, les 1ère STL, ont aussi participé à la validation des appareils embarqués (tracker, caméras, appareil photo). Ils ont aussi fabriqués la nacelle.

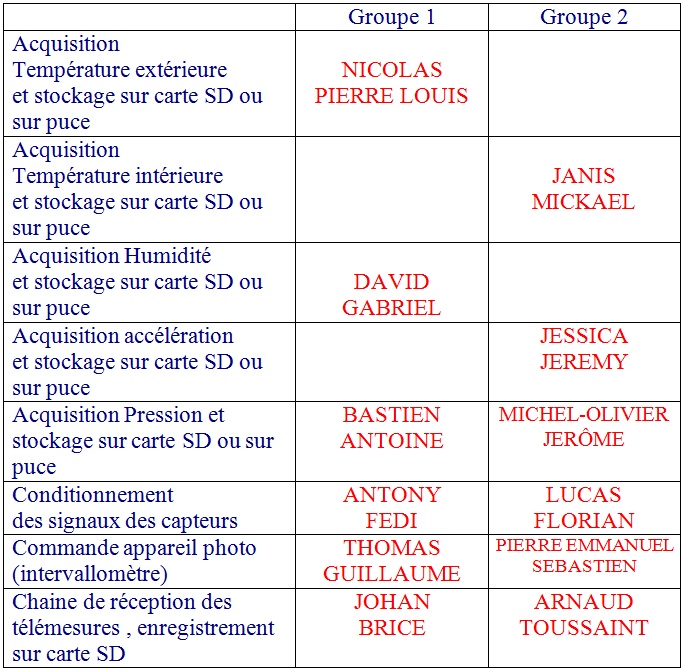
Répartition des tâches au sein de la classe de 1ère BTS SE
Ils ont conçus et réalisé toutes les cartes électroniques du système.


Le 8 juin 2012 , un car affrété par le lycée conduit les élèves de la première STL et la 1ère année en BTS Systèmes électroniques, à l'aérodrome d'Eyguières dans les bouches du Rhône.
Après une série de tests, notre nacelle est validée par les responsables de planètes sciences.
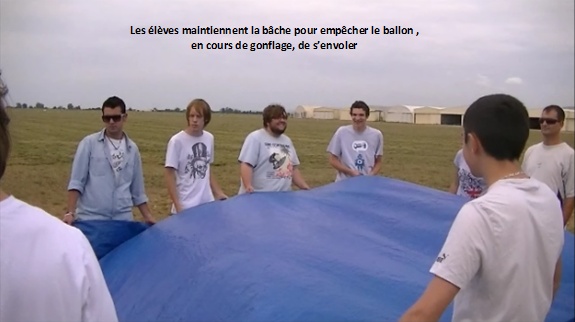
Le lâcher s'organise, par le gonflage du ballon et l'assemblage de la chaine de vol.


 Décollage :12h11mn
Décollage :12h11mn
depuis l'aérodrome de Salon de provence à Eyguières (Bouches du Rhones)
lat :43,654, long :5,017)
 Atterrissage à 15h11mn
Atterrissage à 15h11mn
Dans un champ non loin de la route D43, à Chabotonnes (Hautes Alples) au Nord-Est de Gap au bord , dans le parc National des écrins.
lat :43,654, long :5,017
- Durée du vol : 3h 11s, Durée de la montée : 2h16mn 52s
- Durée de la descente : 43mn19s
- Distance parcourue : 146,9 km
- Vitesse moyenne horizontale : 49km/h
- Vitesse ascensionnelle à la montée : 3,76m/s soit 13,5km/h
- Vitesse ascensionnelle à la descente:-11,54 m/s soit -41,5km/h
- Altitude atteinte : 31km

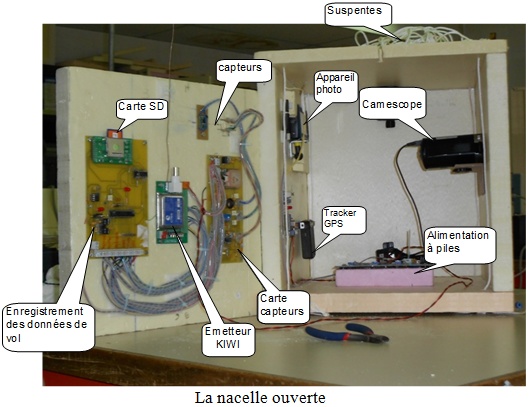
SCHEMA BLOCS ET PHOTOS
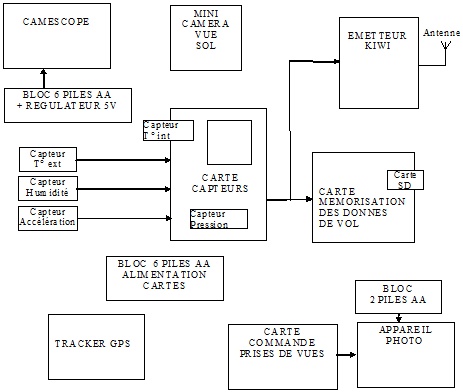
La Nacelle a été construite par les élèves de 1ère STL. Hormis carte émetteur KIWI, toutes les cartes électroniques et le câblage ont été réalisés par les 1ère année de BTS systèmes électroniques .
L'enceinte de la nacelle a été réalisée par Sacha,Romain M, Jeremy pour le groupe 2 et Alison, Morgane et Axelle pour le groupe 1. Ont aussi participés à l'aménagement
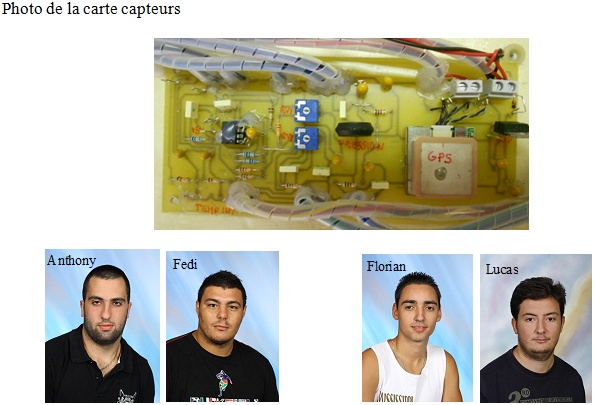
Les binômes d'élèves Anthony et Fedi et Lucas/Florian ont chacun développé une carte capteur. Ci-dessus, en photo, la carte qui a été embarquée.
Mesure de la préssion
 Objectif :
Objectif :
Mesurer la pression, pour en déduire l'altitude du ballon à tout moment de son vol.
Capteur
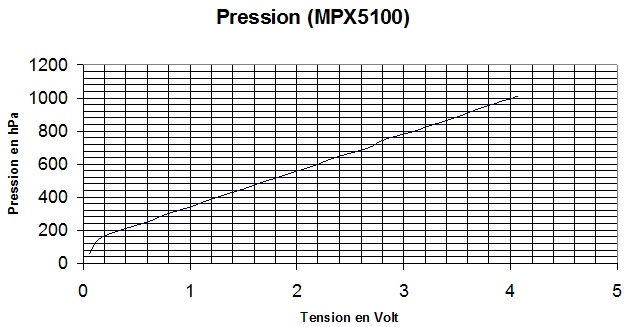
Modèle de choisi : MPX5100
Il est monté sur la carte capteur qui l'alimente et filtre sa sortie .
Conçue et réalisé par élèves en SE1
Courbe d'étalonnage
Effectuée par les élèves de 1ère STL Morgane,Axelle et Ornella pour le G1 et Benoit/RomainD pour le G2
Dispositif utilisé pour l'étalonnage
La cloche à vide disponible au lycée est un modèle qui équipe de nombreux établissements, mais il ne peut descendre en dessous de 100hPa ; ce qui correspond environ à une altitude de 14,5km, alors que la sonde monte à environ 30km d'altitude.
Nous avons réalisé à peu de frais une cloche à vide descendant à 35hPa, soit l'équivalent de 25km d'altitude. Le pressiomètre permet la mesure précise de la pression permettant ainsi de dresser la courbe d'étalonnage du capteur, cet appareil de mesure est généralement disponible dans les lycées, sinon son prix chez Jeulin est d'une centaine d'euros. Si on récupère le compresseur d'un vieux frigo. L'ensemble du matériel restant est constitué revient à une quinzaine d'euros !
Ci-dessous une photo de l'installation :
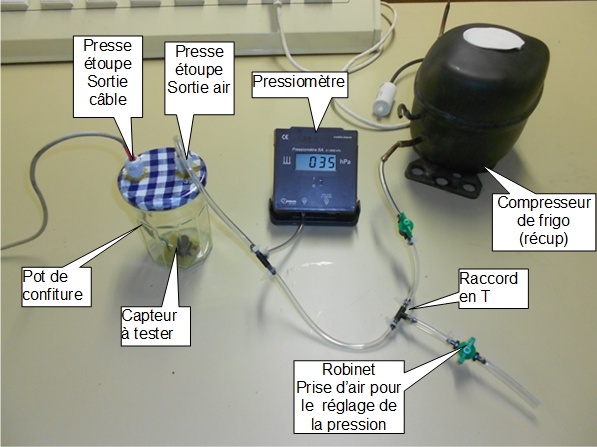
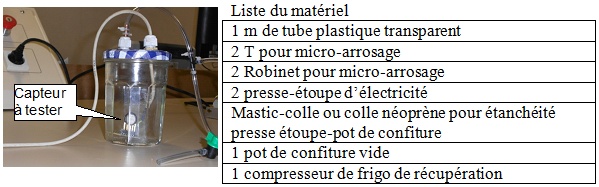
A noter qu'en utilisant 2 compresseur de frigo en cascade ,on peut arriver à une pression de 15hPa soit l'équivalent de 31km d'altitude !
Mesures éffectuées en vol
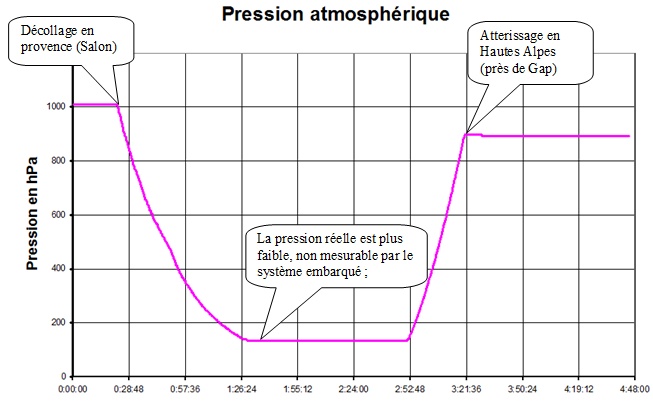
Analyse :
La pression atmosphérique à l'arrivée est beaucoup plus faible que celle du départ, ce qui est du à la différence d'altitude entre les 2 points (environ 1km)
Le fait que le système ne parvienne pas à mesurer des pressions inférieures à 138hPa, est du au capteur qui ne peut mesurer des pression inférieure à 130hPa.
Amélioration à prévoir :
Sauf à trouver un capteur de pression absolue qui permet de mesurer des très basses pressions d'environ 15hPa, une autre solution possible, sera de prévoir un deuxième capteur, mais de type différentiel à 2 embouts, dont un embout sera bouché et donc taré à une pression faible, ce qui correspondra à une certaine altitude élevée, il mesurera l'écart de pression entre cette altitude initiale déjà élevée et une altitude supérieure.
Courbe de l'altitude
De la courbe de pression on en a déduit l'altitude par l'utilisation de la formule altimétrique normalisée qui tient compte de la température et de la pression atmosphérique au sol.
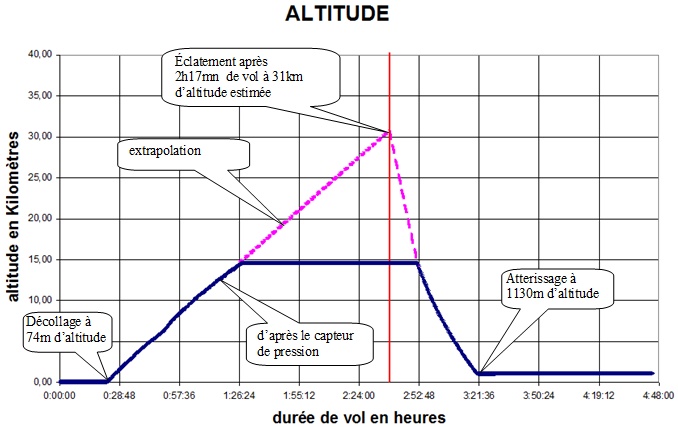
Analyse des mesures :
On constate que l'ascension s'effectue à vitesse constante, qui d'après la courbe est de 3,76m/s
On constate que , compte tenu des limitations citées au sujet de la mesure des la pression matériel embarqué, les mesures ne sont valables que jusqu'à environ 15km d'altitude.
D'après la théorie et surtout d'après des relevés de multiples autres expériences, on a pu constater que la vitesse ascensionnelle est quasiment constante jusqu'à l'éclatement du ballon. C'est pour cela que nous avons pu nous permettre d'extrapoler la courbe, jusqu'à l'instant d'éclatement qui nous a été donné par la caméra vidéo. On a ainsi pu en déduire que le ballon a atteint, après 2h17mn d'ascension, l'altitude de 31km avant d'éclater.
Amélioration à prévoir :
L'utilisation d'un deuxième capteur de pression affectée aux basses pressions, permettra d'éviter l'extrapolation, en donnant une mesure de la pression réelle.

Objectif :
Cette mesure permettra de connaître avec précision les contraintes thermiques subies par le matériel embarqué.
 Capteur temperature interieure
Capteur temperature interieure
Pour la température intérieure Laura /Jeremy et Antonin/Lea de 1STL ont choisi une CTN (résistance à coefficient de température négative) à cause de la simplicité d'utilisation et de la facilité de mise en œuvre.
Dispositif utilisé pour l'étalonnage
Il faut, bien sûr, un thermomètre de référence et une enceinte dans laquelle il faudrait faire varier la température d'environ -50°C à +40°C, ce qui n'est pas facile. De plus, du fait de la courte durée des séances de TP (2h), .les différentes températures devront être obtenues rapidement. Pou cela , nous avons choisi un godet métallique de faible volume (4cm x 5cm), qui contiendra une huile dans laquelle seront immergés les capteurs.
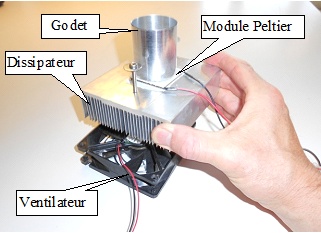 Ce godet sera refroidit ou réchauffé par un système composé d'un module à effet Peltier associé à son dissipateur que l'on pourra par exemple récupérer d'une glacière de voyage 12V .
Ce godet sera refroidit ou réchauffé par un système composé d'un module à effet Peltier associé à son dissipateur que l'on pourra par exemple récupérer d'une glacière de voyage 12V .
Le module Peltier, lorsqu'il est alimenté, chauffe sur une de ses faces et refroidi sur l'autre. Un ventilateur d'alimentation de PC améliore l'évacuation des calories de la face chaude.
Il faut ensuite entourer le godet d'une mousse pour l'isoler thermiquement de l'ambiant. Pour cela, nous avons disposé un tube de 7,5cm ( tube de poêle) autour du godet et avons rempli l'espace entre le godet et le tube d'une mousse expansive isolante.
Le module à effet Peltier a été alimenté avec une alimentation pouvant fournir 5A sous 15V. On règle la température en faisant varier le courant . Suivant la polarité, l'enceinte refroidi ou bien chauffe.
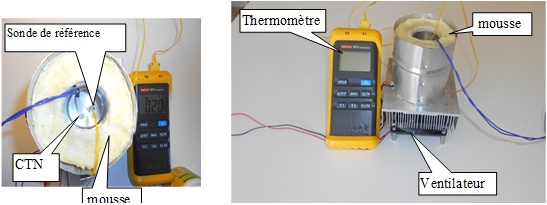
Le ventilateur, doit être choisi le plus puissant possible, et est alimenté avec une autre alimentation.
Avec un ventilateur de 11W et en alimentant le module Peltier sous 5A, nous avons atteint --20°C dans le godet. Nous avons utilisé une huile inoffensive de type Marco ; à partir de -10°C , cette huile prend la consistance d'un gel, tout en restant opérationnelle.
Le thermomètre de référence est un modèle à thermocouple au dixième de degré souvent disponible dans le labo de physique des lycées.
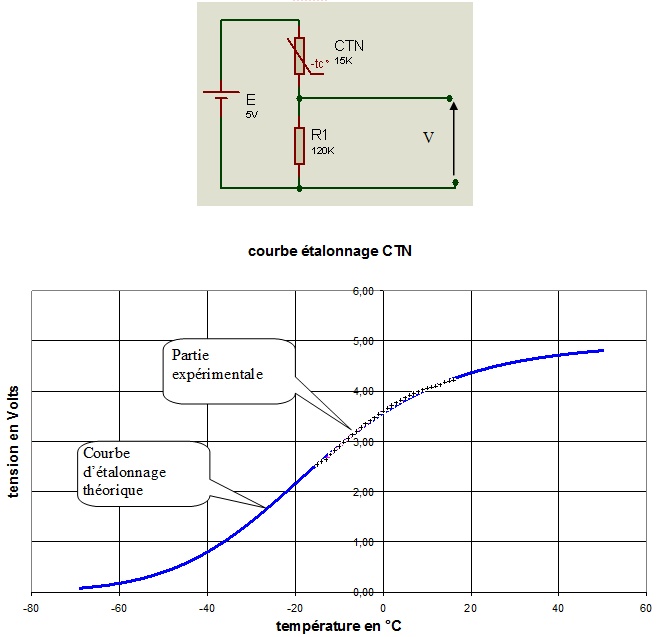
Courbe d'etalonnage
Pour récupérer une tension à partir de la variation de résistance de la CTN, on a eu recours au montage ci-dessous . Les valeurs données sont les valeurs normalisées, en fait on a mesuré R1=119kO au lieu de 120kO, E=5,0V et Rctn=15,4kO à 25°C au lieu de 15,0kO0
Mesures effectuees en vol
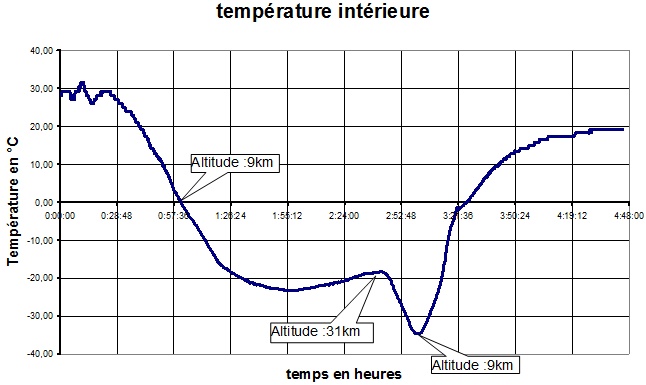
Analyse des mesures :
On constate d'abord que la température minimale atteinte est de -35°C, alors qu'à l'extérieur la température atteint -50°C, cela prouve que malgré la non étanchéité de l'enceinte de la nacelle, sa constitution en polystyrène et la chaleur produite par les accus et l'électronique embarquée, permet d'éviter au matériel de subir les -50°C.
Ensuite, en corrélant la courbe d'altitude avec celle de la température intérieure, on relève que la température remonte à partir d'environ 14km d'altitude, ensuite après l'éclatement du ballon à 31km d'altitude, la température redescend jusqu'à -35°C. Le fait que la température intérieure a une même altitude soit plus basse à la descente qu'à la montée, peut s'expliquer par la vitesse de chute plus importante que la vitesse ascensionnelle , ce qui refroidit plus facilement l'intérieur de la nacelle.

Décollage de « Over the rainbow »

 Objectif :
Objectif :
Cette mesure a pour but d'étudier l'évolution de la température en fonction de l'altitude.
Capteur temperature exterieure
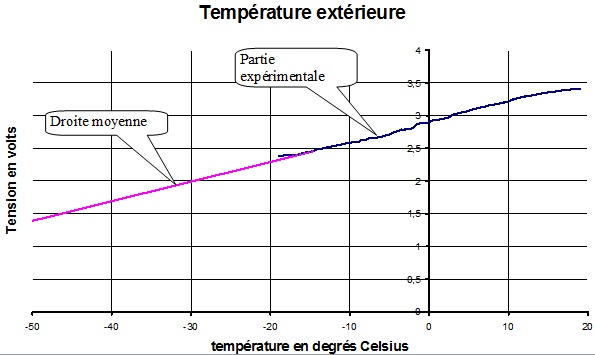
Pour la température extérieure Chloé/Alison et Julia/Ambre ont utilisé un LM135, c'est un capteur électronique qui a l'avantage de délivrer une tension proportionnelle à la température en °K , par contre sa mise en œuvre est plus compliquée qu'une CTN car elle requiert une électronique associée qui a été réalisé par Anthony et Lucas .
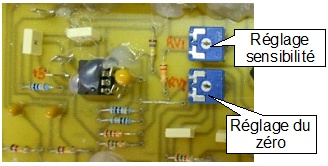 Ces 2 réglages permettent l'étalonnage du capteur.
Ces 2 réglages permettent l'étalonnage du capteur.
Courbe d'etalonnage
Le dispositif utilisé pour l'étalonnage est le même que pour la température intérieure.
Cette courbe est en fait la droite moyenne passant par les points de mesure. La dispersion des points autour de cette droite moyenne est faible (1°C au max) est due principalement aux conditions de mesures.
Mesures effectuées en vol
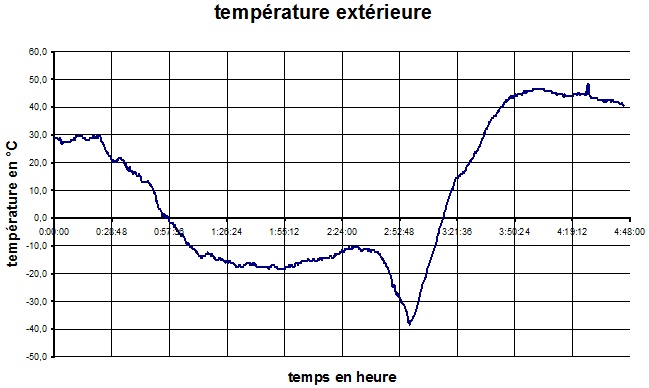
Analyse des mesures :
La courbe obtenue ne colle pas à la réalité, en effet on voit qu'à l'atterrissage la température dépasse les 40°C, ce qui ne correspond pas du tout à la réalité météorologique du lieu.
L'explication est que le capteur n'était visiblement pas à l'ombre. A l'installation, il a été insuffisamment protégé du soleil.
Ceci est confirmé par le fait que la température minimale relevée par le capteur est de -38°C alors qu'elle devrait être d'environ -50°C.
On relève aussi que durant certaines phases du vol la température extérieure serait supérieure à la température intérieure, ce qui renforce l'hypothèse que le capteur de température extérieure aurait été exposé au soleil.
Cette courbe n'est donc significative.
Amélioration à prévoir :
Il suffit de mieux protéger le capteur des rayons du soleil, tout en le disposant à l'extérieur de la nacelle.
Photo prises depuis « Over the rainbow 2012 » peu après le lâcher.

 Objectif :
Objectif :
Mesurer l'humidité extérieure, de façon à identifier le passage dans les nuages.
Capteur d'humidite
Marco et Nathan ont utilisé le HIH4004. Ce capteur présente l'avantage de fournir une tension fonction quasi linéaire de l'humidité relative. Comme la plupart des capteurs d'humidité, la précision est faible puisque l'erreur peut atteindre jusqu'à 10%
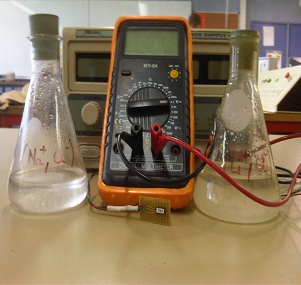 Etalonnage à l'aide de 2 solutions de référence
Etalonnage à l'aide de 2 solutions de référence
Cette méthode ne fourni pas un étalonnage complet, mais donne 2 points extrémités de la courbe. Si la loi de variation du capteur est linéaire alors la droite passant par les 2 points est considérée comme la caractéristique du capteur. Cette méthode est d'autant plus acceptable que la précision du capteur est faible.
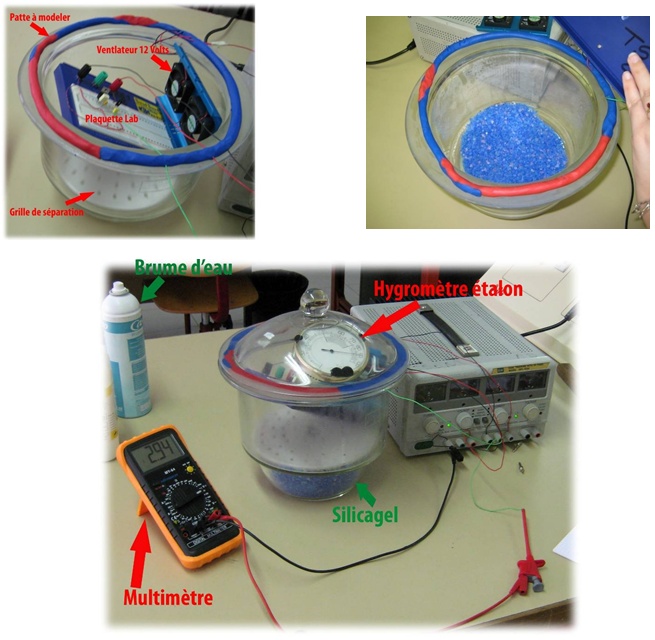
Etalonnage avec enceinte à humidité variable
Le principe consiste à faire varier l'humidité dans une enceinte fermée , dans laquelle on place le capteur , un hygromètre de référence. ainsi qu'un ventilateur qui permet d'avoir un taux d'humidité uniforme dans ce volume fermé.
Dans l'enceinte on place aussi un absorbeur d'humidité tel que le Silica gel. On attend que l'humidité tombe à des taux très faible, puis à l'aide d'un aérosol brumisateur on fait varier le taux d'humidité. La pate à modelé, permet d'assurer l'étanchéité du couvercle tout en laissant le passage aux fils électriques
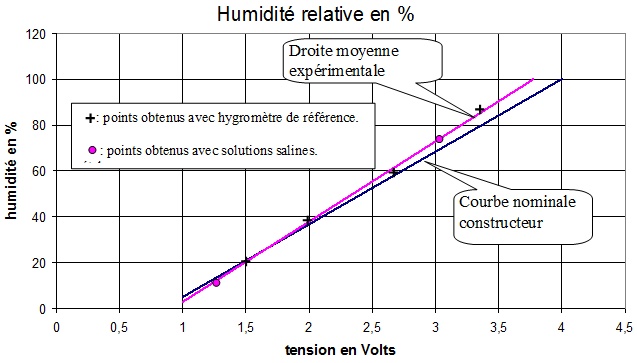
![]() Grâce à cette courbe expérimentale, on déterminera le taux d'hygrométrie d'après la tension fournie par le capteur, par la relation :
Grâce à cette courbe expérimentale, on déterminera le taux d'hygrométrie d'après la tension fournie par le capteur, par la relation :
Cette courbe est en fait la droite moyenne passant par les points de mesure assez dispersés, car la précision de ce capteur est d'environ 10%.
Mesures effectuees en vol
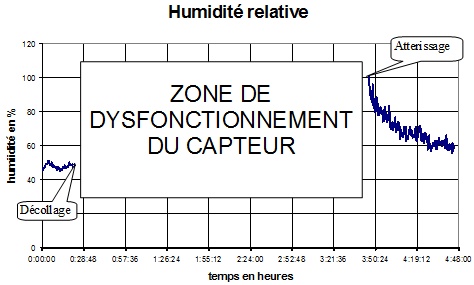
Analyse des mesures :
On constate que le capteur a fonctionné avant le décollage et après l'atterrissage. Pendant le vol, le capteur n'a pas fonctionné, reste à éclaircir la raison de ce dysfonctionnement.
 Objectif :
Objectif :
L'ascension du ballon s'effectue quasiment à vitesse constante donc à accélération nulle. L'intérêt du capteur d'accélération est de pouvoir détecter l'instant de l'éclatement du ballon et celui de l'atterrissage.
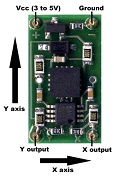
Capteur d'accélération
Sacha et Martin ont mis en œuvre un module ACCM2G à base d'accéléromètres à circuit intégré. Ce modèle a été choisi pour sa facilité d'utilisation, car il délivre 2 tensions fonctions linéaire de l'accélération et décélération sur 2 axes orthogonaux. Seul l'axe vertical a été utilisé exploité.
Sa gamme de mesure va de 0 à 2G.
 Mesures réalisées en vol :
Mesures réalisées en vol :
La courbe est un encéphalogramme plat !Après analyse, le dysfonctionnement viendrait du filtrage du signal de sortie du module, qui a été filtré de façon trop efficace et qui étouffe les variations rapides du signal image de l'accélération..
Amélioration à prévoir:
Il suffit de modifier le filtre en conséquence. Il est possible aussi d'augmenter la sensibilité du capteur en amplifiant la sortie du capteur de façon raisonnable de façon à garder une dynamique de mesure suffisante.
Objectif
Transmettre par ondes radios, en direct, les mesures faites à bord, afin de suivre en direct les données de vol et de les enregistrer dans un fichier.
Réalisation
Les mesures sont transmises grâce à un émetteur radio (le Kiwi) embarqué à bord de la nacelle. Cet émetteur est prêté par le CNES , sa puissance de sortie est 250mW.
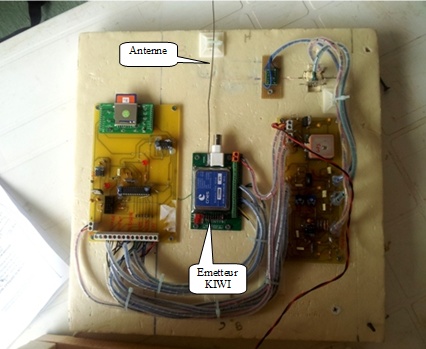
A terre, une station de réception sophistiquée installée dans un camion du CNES (le spatiobus) , permet la réception des mesures, leur enregistrements sur un fichier ainsi que la visualisation en direct de l'évolution sur grand écran des grandeurs physiques mesurées à bord (températures, pression, etc)

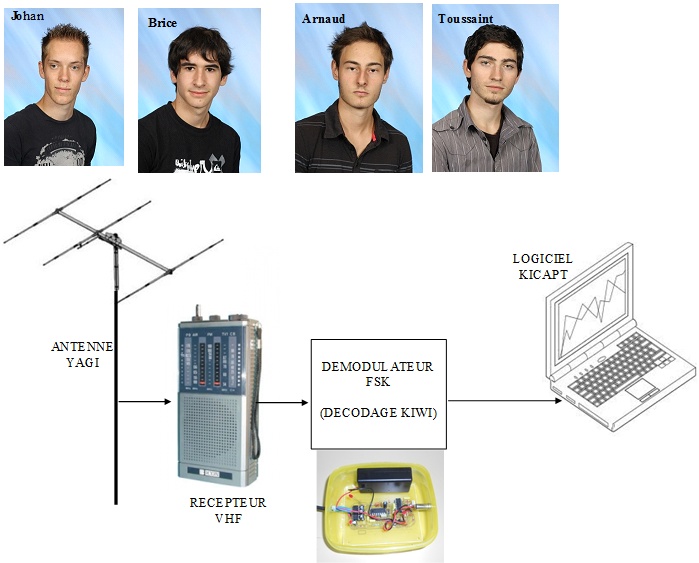
Les élèves de BTS systèmes électroniques Johan/Brice et Arnaud/Toussaint ont développé une station de réception complète, moins sensible que celle du spatiobus, elle n'a pas été utilisée lors du lâcher. Elle a, tout de même permis la mise au point préalable et la validation de fonctionnement de l'ensemble du système avant le jour du lâcher.

Analyse du fonctionnement de la télémesure le jour du lâcher
Les mesures ont été bien reçues à terre par le spatiobus, durant 2h46 de vol . Ensuite, la liaison radio a été perdue, soit 13mn avant l'atterrissage. L'éloignement (environ 150km) et le relief montagneux de la zone d'atterrissage ( Alpes) expliquent l'interruption de la liaison radio.
Fort heureusement, les données ayant été, par ailleurs, enregistrées à bord, toutes les mesures ont peu être récupérées.
Les données sont ici exprimées en volts, qu'il convient de les convertir en grandeurs physiques grâce aux courbes d'étalonnages. Cette conversion s'effectue via un tableur comme Excel.

Photo prises depuis « Over the rainbow 2012 » peu après le lâcher

Sourire d'Ambre
Objectif
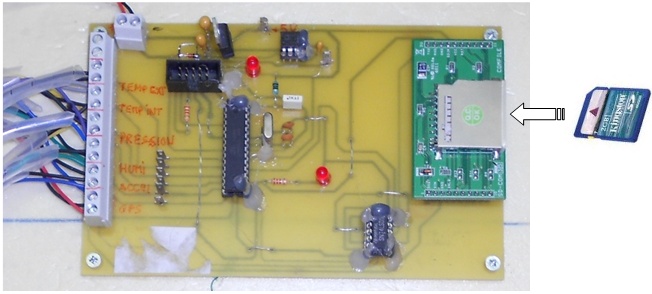
Il s'agissait de mémoriser sur une carte SD, toutes les mesures effectuées, afin de palier à d'éventuels pertes du signal ou problèmes de transmission de la télémesure.
Réalisation
Cette fonction a été étudiée par les binômes d'élèves Nicolas/Pierre-Louis, Bastien/Antoine et Jessica/Jeremy et Mickael/Janisqui ont tous réalisés une carte. Ci-dessous, en photo, la carte qui a été embarquée.
Analyse des résultats obtenus
Les mesures ont été parfaitement enregistrées sur une carte SD. Les mesures perdues du fait de la perte du signal radio en fin de vol ont pu donc être récupéré grâce à cette carte.
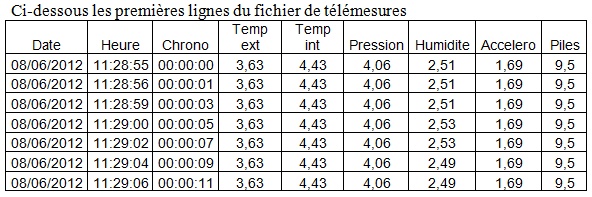
On dispose d'un total de 9000 mesures stockées dans un fichier dont on a reproduit ci-dessous les premières lignes
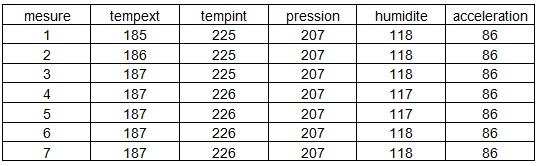
Les valeurs sont les données brutes codées entre 0 et 255, 0 correspond à 0V et 255 correspond à 5V. Il convient donc de les convertir via les courbes d'étalonnages.
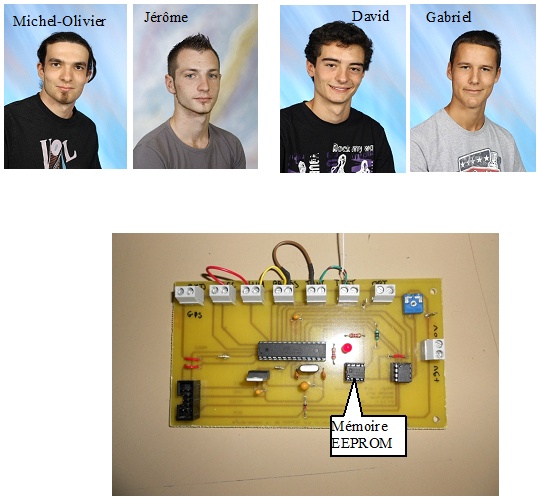
Autre dispositif réalisé
Les binomes d'élèves David/Gabriel et Jérôme/Michel Olivier ont conçu et réalisé chacun une carte électronique ayant la même fonction d'enregistrement des données de vol, mais sur une puce électronique au lieu d'une carte SD. Ces cartes prévues pour une deuxième nacelle, n'ont pu être embarqués sur « Over the rainbow »
Amélioration à apporter :
Il serait utile d'enregistrer aussi pour chaque mesure, les coordonnées géographiques et l'altitude données par un GPS embarqué.
Appareil Photo
Objectif :
Il s'agit de prendre des photos à intervalles réguliers, afin de ramener des images du vol. Dans des prix raisonnables, nous n'avons pas trouvé d'appareils photo, qui dispose de cette possibilité appelée fonction « intervallomètre ». Les mesures de consommation de l'appareil photo ont été réalisées par Laura/ Jeremy et Ornella/Axelle
Réalisation
Une solution consiste à réaliser une commande électronique qui viendra se brancher sur le poussoir de déclenchement d'un appareil photo.
La plupart des appareils ont le bouton d'enclenchement qui fonctionne en 2 temps, le passage à mi course enclenche un premier contact qui fait la mise au point et à fond un deuxième contact déclenche la prise de vue. Nous avons choisi est le Sportline60 de Rolleï, car c'est un des rares appareils avec un poussoir d'enclenchement qui fonctionne en un seul temps, ce qui simplifie l'électronique de commande.
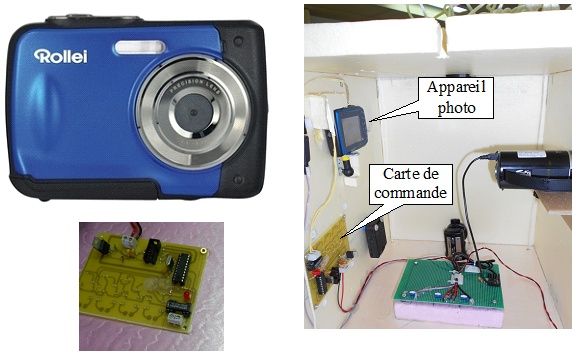
L'électronique de commande a été conçue et réalisée par les binômes Thomas/Guillaume et Sébastion/Pierre-Emmanuel
Analyse des résultats
L'appareil, s'est arrêté de fonctionner au bout d'une vingtaine de minute. Nous n'avons pas trouvé d'explications à cet arrêt.
Les photos réalisées ne sont guère satisfaisantes car trop sombres et sans rapport avec la luminosité ambiante.
Amélioration possible
Compte tenu de la qualité des photos prises par cet appareil, il conviendrait à l'avenir, de changer de modèle d'appareil.

Camescope : Vue horizon
Objectif
Il s'agissait de ramener un film de l'intégralité du vol, comme vu d'un hublot.
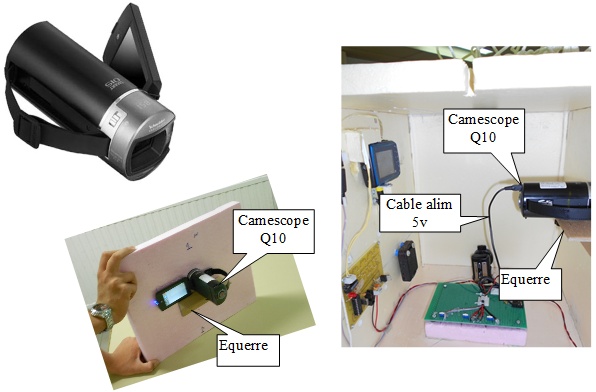
Nous avons choisi le Q10 de chez Samsung , il présente les avantages suivants :
- Angle d'ouverture plus grand que les concurrents du même prix (équivalent à un 38mm pour le format argentique 24 x 36)
- Appareil léger :186g
- résolution Full-HD possible
- Entrée alimentation externe 5V/1A
- Bon rapport qualité-prix (moins de 200€)
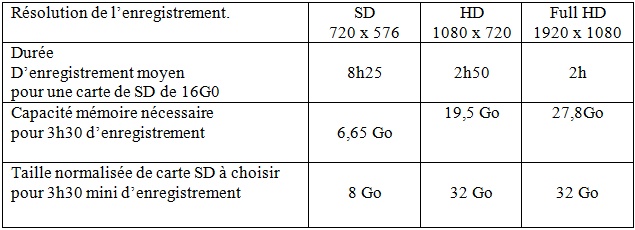
Pour pouvoir bénéficier d'un enregistrement en HD ou Full HD, il faut installer une carte de 32 Go.
En branchant une alimentation 5V, le caméscope consomme d'abord sur son accumulateur pendant environ 2 heures et ensuite il consomme sur l'alimentation externe de 5V. Cela permet d'obtenir une autonomie correspondant à toute la durée du vol qui peut atteindre 3h30.
L'accu interne, chauffe et évite ainsi que le caméscope voit sa température ne pas trop baisser aux hautes altitudes.
Analyse des résultats obtenus
Malheureusement, lors du décollage, une erreur de manipulation n'a pas permis au caméscope de se mettre en route. Nous n'avons donc aucune image de cet appareil.
Améliorations
Installer le caméscope dans la nacelle de façon à ce que les commandes soient plus accessibles. Réaliser une check- list à utiliser lors de la mise en route des appareils juste avant le décollage.
Camera : Vue sol
Objectif
Il s'agissait surtout de ramener des photos du décollage, de l'atterrissage. Mais aussi du moment de l'éclatement et de la chute libre.
Moins soucieux de la qualité des images que pour le caméscope vue horizon, nous avons opté pour une mini caméra embarquée.
Les tests sur cette caméra ont été réalisés Julia ,Ambre et Laura
Le modèle choisi est le XTC200 de Midland qui a les avantages suivants :
- Grande ouverture de 140°
- Haute résolution possible (1280 x 720)
- Grande autonomie donnée pour 3h
- Dispositif de fixation autocollant, très bien adapté à la nacelle
- Solidité
- Faible encombrement
- Prix raisonnable (environ 200€)

Analyse des résultats obtenus
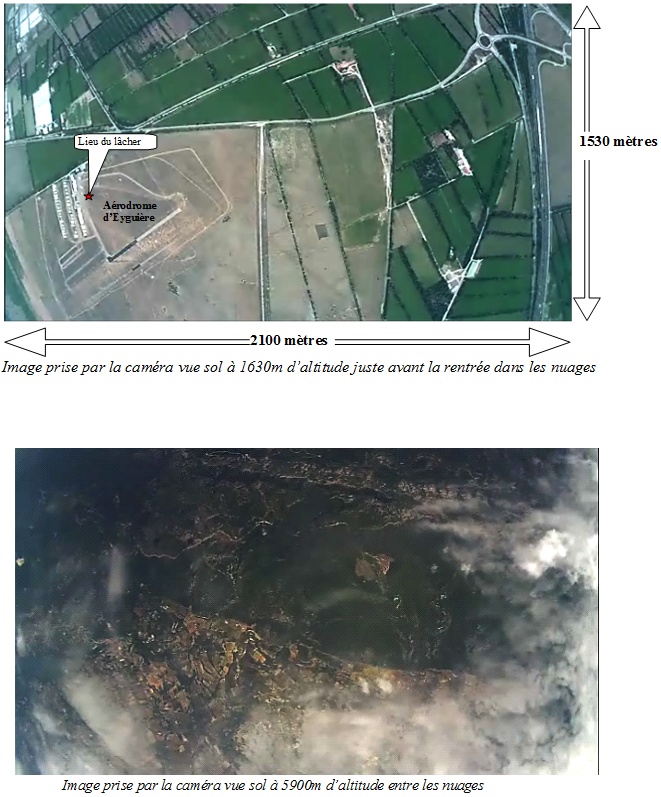
La caméra a très bien fonctionné. L'autonomie annoncée était de 2h30, nous espérions un vol court, pour voir aussi l'atterrissage. Malheureusement, l'autonomie réelle n'a été que de 2h et le vol a durée 3h, et il n'y a donc pas d'images de l'atterrissage.
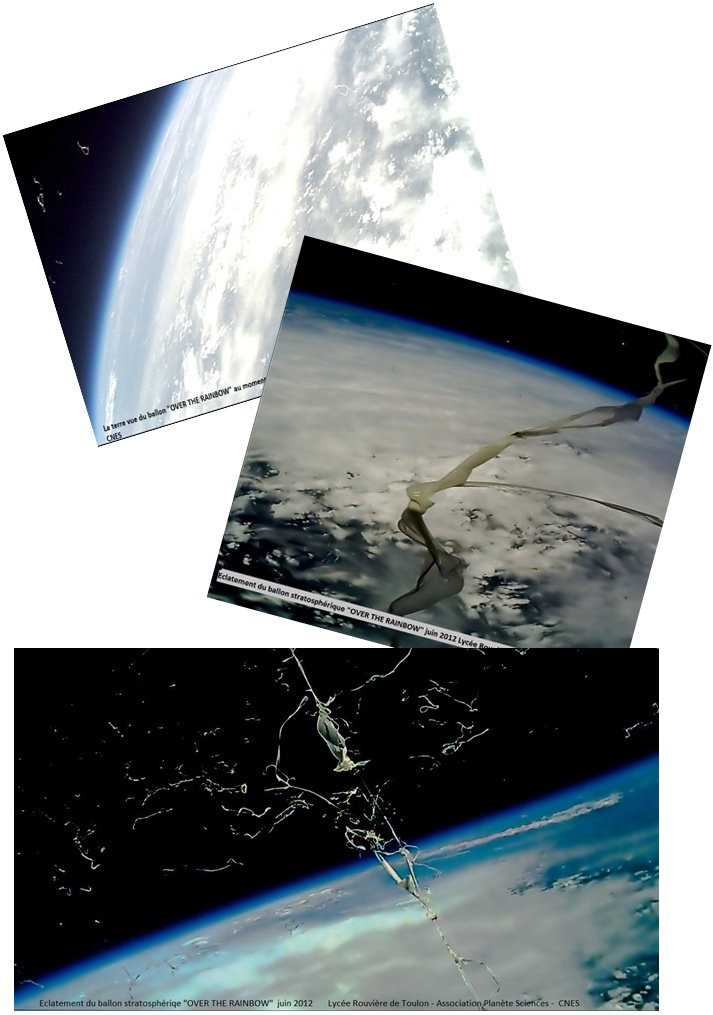
Le temps étant très couvert ce jour là, la nacelle est entrée dans les nuages au bout de 6mn de vol à 1620mn d'altitude. Au-delà la caméra a filmé essentiellement du brouillard ou des nuages. Au moment de l'éclatement, la nacelle a subitement basculé et la caméra a pu filmer des images de la terre et des lambeaux de ballons.
Objectif :
Fournir l'énergie électrique aux dispositifs embarqués.
Pour les caméras et caméscope et tracker GPS nous avons conservé les batteries internes
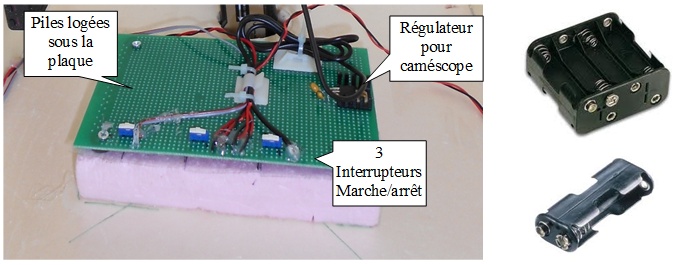
Les alimentations réalisées sont aux nombres de 3, toutes obtenues par des blocs de piles bâtons de 1,5V type AA. En tout, il y a 14 piles.
Les élèves suivants ont participés à la réalisation de l'alimentation Romain M/ Nathan , Julia/Ambre et Lucas /Pierre-Emmanuel
Alimentation des cartes électroniques :
Un bloc de 6 piles en série soit 9V pour alimenter les cartes électroniques, qui fonctionnent avec une tension d'alimentation supérieure à 7V . La consommation totale s'élève à 180mA à fournir pendant la durée du vol donc au moins 3h30
Alimentation de soutien pour le caméscope
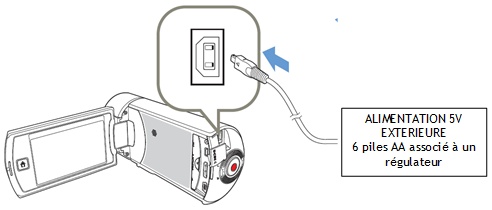
La batterie interne au caméscope permet d'avoir une autonomie en mode enregistrement mesurée à 2h (à 25°C). Le voyage pouvant durer 3h30, cette autonomie s'avère insuffisante, une alimentation externe de 5V branché sur la prise DC power du caméscope permet de « soutenir » la batterie interne. Lorsque la batterie interne est chargée, le courant demandé à l'alimentation externe est de 500mA. Le vol pouvant durer 3h30, les piles doivent donc pouvoir fournir 500mA pendant au moins 1h30.
Cette alimentation externe est réalisé par bloc de 6 piles en série soit 9V suivi d'un régulateur de tension de 5V.
Alimentation pour l'appareil photo
L'alimentation de l'appareil photo, s'effectue par 2 piles AA. L'appareil consomme en moyenne 300mA et fonctionne jusqu'à une tension de 2,4V.
 Choix des piles
Choix des piles
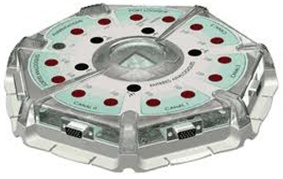
Les binômes Benoit / Romain D ainsi qu'Antonin/Léa ont mis un œuvre le système d'acquisition SYSAM SP5 ci contre pour relever automatiquement , grâce au logiciel Latis-Pro , les courbes de décharges de 2 piles alcaline identiques de marque « Camelion » soumis à des charges résistives de 3,3 Ohms soit 0,45A à 1,5V et 7,5Ohm soit 0,2A à 1,5V.
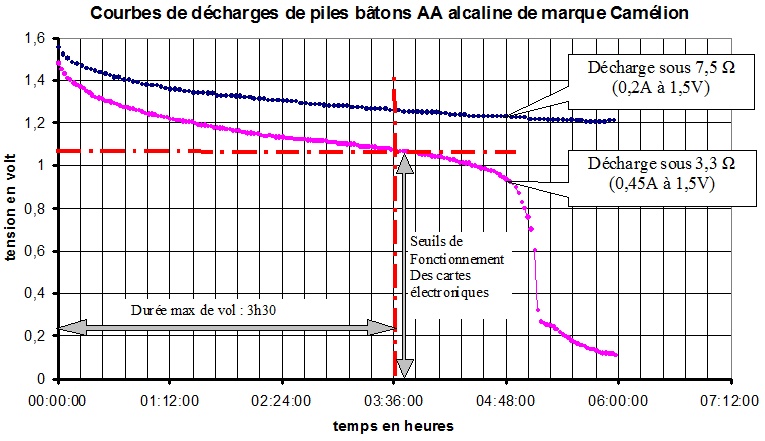
Ces courbes ont montré qu'avec des piles alcalines , l'autonomie de 3h30 était atteinte sauf pour l'appareil photo. La technologie Lithium par contre convient.
Ci-dessous les courbe de décharge comparées donnée par le constructeur Energizer de piles AA au lithium et alcaline.
On constate que sous 1A la pile lithium a une autonomie de 4h !
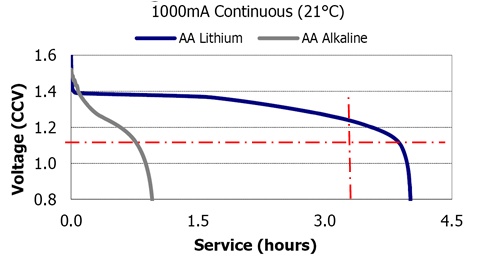
De plus , les piles lithium on deux autre avantages majeurs : leurs performances sont garantis jusqu'à -40°C et sont presque deux fois plus légères que les piles alcalines, soit un gain de poids de 130g pour les 14 piles. Ce gain n'est pas négligeable, sachant que le poids de la nacelle ne doit pas dépasser 2500g! nous avons donc opté pour la technologie Lithium pour toutes les piles.
Analyse des résultats obtenus
Les piles au lithium ont données entières satisfaction, ainsi après 3h de vol, les piles alimentant les cartes électroniques étaient encore chacune à 1,4V !
Il aurait été judicieux d'utiliser des piles pour soutenir la batterie interne de la camera vue sol, afin de pouvoir filmer l'atterrissage.
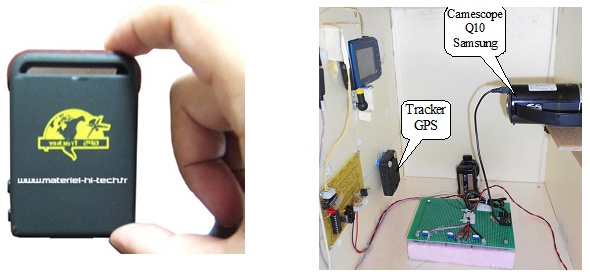
Le tracker GPS est un GPS couplé à un téléphone portable fonctionnant sur le réseau GSM, mais qui ne possède pas de clavier. On installe donc à l'intérieur une carte SIM et il est commandé par des SMS envoyé par un autre portable. Son rôle est d'indiquer les coordonnées géographiques de l'endroit où il se trouve. Le modèle choisi est le TK102 fourni par Géotraceur.
Les binômes de 1ère STL, Nathan/Marco et Benoit/Romain D ainsi que Laura et Antonin ont été responsables de la prise en main et de la programmation de l'appareil ; ils l'ont programmé pour qu'il envoie automatiquement toutes les 30secondes environ, sa position géographique.
A noter que malheureusement, le tracker n'envoie pas l'information d'altitude, que nous avons pu déterminer en recoupant la courbe d'altitude établie grâce aux mesures de pression.
Analyse des résultats obtenus
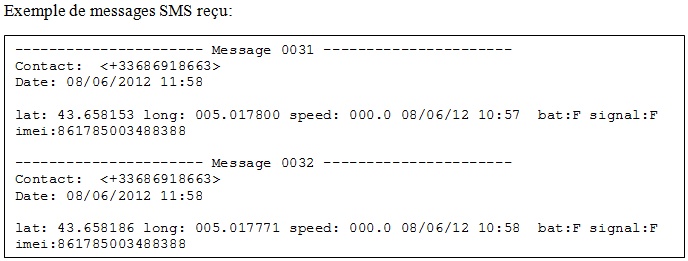
Nous avions programmé le tracker, pour qu'il nous envoie un SMS de sa position toutes les 31 secondes . L'appareil a très bien fonctionné, jusqu' à la perte du signal GSM , qui a eu lieu à 14,5km d'altitude, au bout de 1h15mn de vol, alors que le ballon était encore à la verticale de son point d'envol.
La récupération du contact avec le tracker a eu lieu 1h33mn plus tard, c'est-à-dire à la redescente du ballon alors qu'il était à 10km d'altitude et à 116km du point de départ , entre la motte du Caire et Leyne les Alpes dans le département des alpes de haute Provence
La nacelle a donc parcouru la distance de 116km en 1h33 , soit à la vitesse moyenne de 74,8km/h ! Visiblement, il y a avait en altitude un vent de Sud-Ouest important.
Grâce à la localisation GPS, du lieu de l'atterrissage, nous avons pu récupérer la nacelle le soir même dans un champ de la commune de Chabottones (Hautes Alpes) à quelques dizaines de mètres de route D43, dans parc national des écrins
fin du voyage d'« Over the rainbow » dans un champ très près d'une route.










